od pojmom filtrácia obrazu budeme rozumieť taký proces aplikovaný na vstupný obraz, výsledkom ktorého je obraz so zmenenými vlastnosťami. Táto zmena sa prejavuje ako v časovej resp. priestorovej oblasti, tak aj vo frekvenčnej oblasti. Z definície je jasné, že pod filtráciou si možno predstaviť veľmi veľa spôsobov úpravy vlastnosti obrazu. Najčastejšie sa stretávame s tymíto typmi filtrácie:
- Dolno-priepustná filtrácia DP
- Horno-priepustná filtrácia HP
- Pásmovo-priepustná filtrácia PP
- Filtrácia šumu rôzneho charakteru (Gaussov, Impulzný, Biely ...)
- Hranová detekcia
- Iné
Bez ohľadu na druh či účel filtrácie je táto vždy dosiahnutá konvolúciou vstupného obrazu a impulznej odpovede zvoleného filtra. Vo frekvenčnej oblasti sa to potom prejaví ako násobenie spektra signálu a frekvenčnej prenosovej funkcie filtra. Toto je opísané nasledujúcou rovnicou
![]()
Impulzná odpoveď môže byť konečná kedy hovoríme o filtroch s konečnou impulznou odpoveďou (KIO resp. v anglosaskej literatúre FIR), alebo môže byť nekonečná a vtedy hovoríme o filtroch s nekonečnou impulznou odpoveďou (NIO, angl. IIR). Je dôležité zabezpečiť, aby navrhovaný filter bol stabilný, teda aby sa nezmenil na oscilátor. Filter je stabilný, ak suma hodnôt vzoriek jeho impulzných odpovedí konverguje, teda je konečná.
![]()
Filtre KIO sú vždy stabilné a ich implementácia je jednoduchšia, preto sa s nimi pri filtrácii obrazu stretávame oveľa častejšie ako s NIO filtrami. KIO filter pre výpočet hodnoty výstupných vzoriek využíva iba vzorky vstupného obrazu. Algoritmus filtrácie obrazu pomocou KIO filtra je naznačený na obr.1
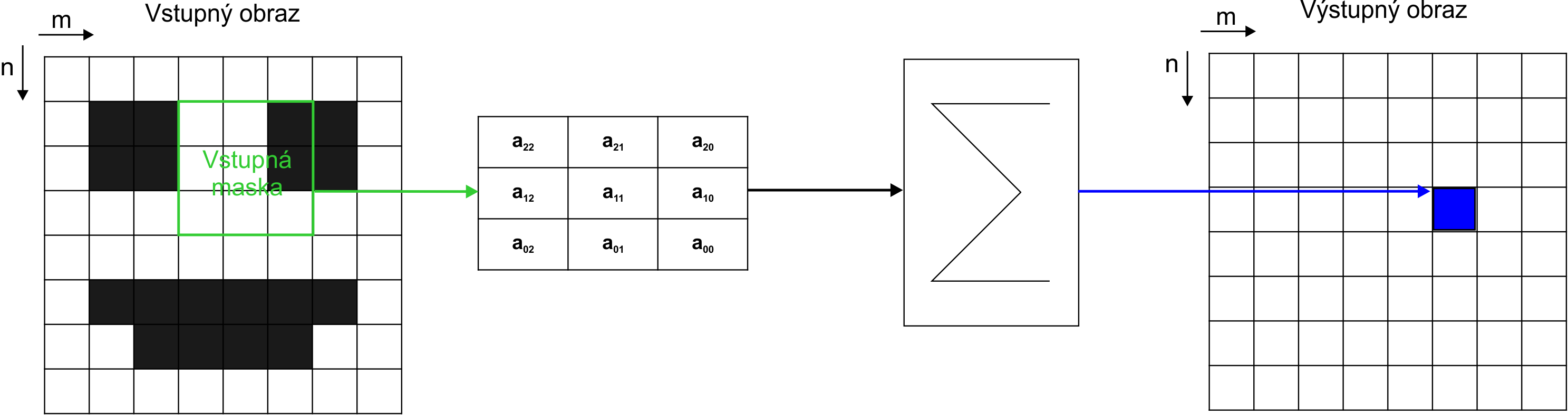
Obr. 1 Filtrácia obrazu pomocou KIO filtra
Nekonečnosť impulznej odpovede NIO filtra je dosiahnutá rekurzívnym zapojením, teda spätnoväzobným zapojením. Pre výpočet hodnoty výstupnej vzorky sa tak použijú nielen vzorky vstupného obrazu, ale aj vzorky z výstupu. Algoritmus filtrácie obrazu s NIO filtrom si môžeme predstaviť tak, ako je zobrazené na obr. 2. Z obr. 2 je zrejmé, že vstupný obraz je filtrom spracovávaný cez posúvajúci sa blok koeficientov axy , ktoré sú násobené so vstupným obrazom. Tento blok resp. maska je v horizontálnom aj vertikálnom smere indexovaná obrátene. Takto je v podstate zabezpečená operácia konvolúcie. Následne výsledná vzorka je ešte normovaná koeficientom b00. Potom sa v spätnej väzbe výstup filtra vracia na jeho vstup. Koeficienty bxz sú vynásobené obrazovými prvkami výstupného obrazu a odčítané od výsledku konvolúcie vstupnej masky a vstupného obrazu.

Obr. 2 Filtrácia obrazu pomocou NIO filtra
Podrobnejšie sa o problematike návrhu číslicových filtrov pojednáva napríklad v tejto literatúre. Pre ďalšie podkapitoly budeme uvažovať iba číslicovú filtráciu pomocou KIO filtra.
Odšumovanie obrazov
Proces odstraňovania šumu z obrazov je v oblasti spracovania obrazov požadovaný veľmi často. Obraz pred ďalším spracovaním je spravidla potrebné zbaviť šumu. Tento šum môže mať rôzny charakter, na jeho potlačenie existuje viacero „bežných" filtrov.
Spriemerňovací filter
Jedná sa o najjednoduchší filter vôbec. Využívame ho pre odstránenie šumu, ktorého povaha je vysokofrekvenčná. Podstata tohto filtra spočíva vo výpočte strednej hodnoty zvoleného bloku. Táto stredná hodnota potom predstavuje hodnotu obrazového prvku vyfiltrovaného obrazu. Miera filtrácie je daná výlučne veľkosťou okna. Čim je okno väčšie, tým je obraz výraznejšie filtrovaný. Bežná veľkosť okna je 3x3, 5x5 alebo 7x7 op. Pri voľbe veľkosti okna je potrebné mať na pamäti aj rozlíšenie obrazu (DPI). To je dôležité z matematického hľadiska. Obrazy s vysokým DPI z matematického hľadiska považujeme za 2D signály snímané s vysokou vzorkovacou frekvenciou. Z teórie vzorkovania a návrhu ČF vieme, že vzorkovacia frekvencia má vplyv na šírku zachyteného spektra. Impulzná odpoveď spriemerňovacieho filtra s rozmerom 2x2, 3x3 a 5x5 op vyzerá nasledovne.

Prenos spriemerňovacieho filtra s takou impulznou odpoveďou je zobrazený na obr. 3. Z amplitúdovej charakteristiky (Magnitude) filtra je zrejmé, že tento filter má charakter DP a tiež, že čím je rozmer okna väčší, tým je šírka preneseného frekvenčného pásma užšia. Na obr. 4 je zobrazený obraz po filtrácii spriemerňovacim filtrom s rôznou veľkosťou okna.


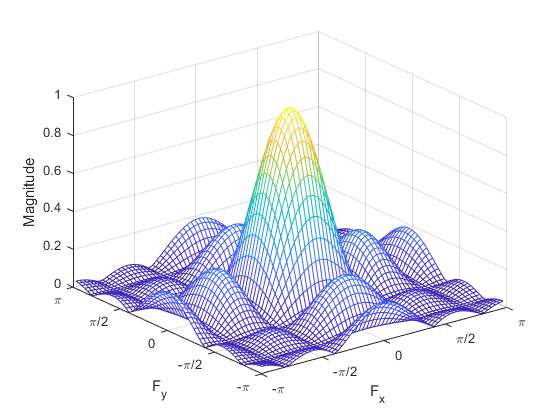
Obr. 3 Amplitúdové frekvenčné charakteristiky spriemerňovacieho filtra s rozmerom 2x2, 3x3 a 5x5 op



Obr. 4 Obraz vyfiltrovaný spriemerňovacím filtrom s rozmerom 2x2, 3x3 a 5x5 op
Gaussov filter
Ide o ďalší filter zo skupiny DP filtrov, ktorý je používaný najčastejšie. Jeho hlavná výhoda spočíva v tom, že za predpokladu, že rozmer jeho impulznej funkcie je dostatočne veľký, jeho frekvenčná prenosová funkcia na rozdiel od prenosovej funkcie spriemerňovacieho filtra neobsahuje tak výrazné postranné laloky. Šírka frekvenčného pásma je okrem rozmeru jadra definovaná hlavne disperziou. Pritom platí pravidlo, že polomer matice (vzdialenosť okrajov matice od prostredného prvku) a musí byť minimálne trojnásobkom smerodajnej odchýlky. Ak uvažujeme maticu s rozmerom 3x3, tak od prostredného prvku sú ostatné prvky vzdialené o 1 prvok. Pre maticu s rozmerom 5x5 sú vzdialené o 2 prvky. Hodnota prvkov matice impulznej odpovede je daná vzťahom:

Integrácia zabezpečuje diskretizáciu plochy pod Gaussovou krivkou. Teda napr. pre rozmer matice 5x5 s jednotkovou disperziou bude impulzná odpoveď vyzerať nasledovne:

Na obr. 5 sú zobrazené amplitúdové frekvenčné charakteristiky filtra s rozmerom 15x15 pre disperziu rovnú 1, 2 a 3.
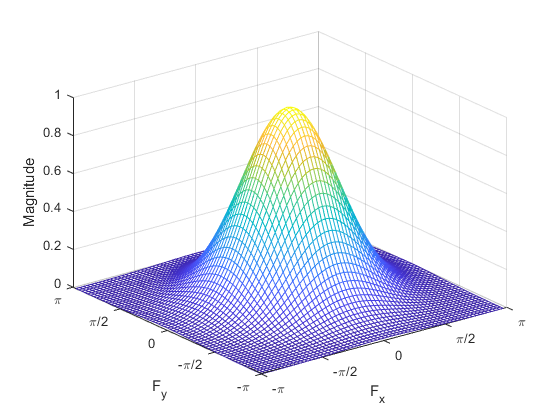


Obr. 5 Amplitúdové frekvenčné charakteristiky Gaussového filtra s rozmerom 15x15 op a disperziou 1, 2 a 3.
Median filter
Tento filter je veľmi nápomocný pri filtrácii obrazu zaťaženého impulzným šumom. Tento šum sa v obraze prejavuje tak, že na náhodných miestach sa objavujú výrazne bodky. Výhodou filtra je, že zachováva hrany obrazu. Princíp tohto filtra spočíva v nahradení obrazového prvku najpravdepodobnejšou hodnotou z jeho okolia. Hlavný vplyv na prenesené frekvenčné pásmo má veľkosť zvoleného okna. Na obr. 6 je zobrazený obraz zaťažený impulzným šumom a obraz po filtrácii mediánovým filtrom.
|
|
| Obr. 6 Obraz vyfiltrovaný médianovým filtrom | |


Detekcia hrán
Pod pojmom hrana v obraze rozumieme oblasť obrazu, kde sa jeho charakter prudko mení. Ide napríklad o zmenu z tmavej časti na svetlejšiu časť, resp. pri farebných obrazoch ide aj o prudkú zmenu farby. Hrana teda predstavuje detail obrazu. Vo frekvenčnej oblasti hrany predstavujú vysokofrekvenčnú časť spektra. Hrana z matematického hľadiska predstavuje výraznú hodnotu gradientu obrazu. Gradient je daný diferenciou prvého radu. Gradient je daný zmenou jasu v horizontálnej a vertikálnej súradnici súčasne. Jeho veľkosť, teda výraznosť hrany, je daná modulom a jeho uhol určuje smer hrany. Výpočet oboch parametrov je daný:

Pre potreby detekcie spravidla postačuje určiť hodnotu gradientu, ktorá sa prahuje vhodne nastaveným prahovým filtrom. Prahovaním sa rozumie proces, pri ktorom prvky, ktorých hodnota prevyšuje hodnotu prahu sa prepustia (resp. nastavia na hodnotu logickej 1) a ostatné prvky sa potlačia.
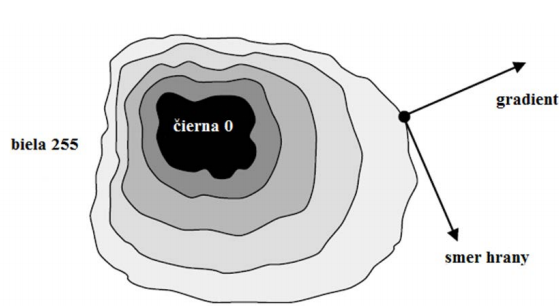
Obr. 7 Smer hrany vo vzťahu ku smeru gradientu
Diferencia 1. radu
Najjednoduchším detektorom je diferencia prvého radu v horizontálnom resp. vertikálnom smere. Výsledok aplikácie tohto detektora na obraz Lena je možné vidieť na obr. 8. Impulzná odpoveď pre horizontálny, vertikálny a diagonálny smer má tvar:
![]()
Prenosové funkcie budú vyzerať tak ako je zobrazené na obr. 9.



Obr. 8 Detekcia hrany pomocou diferencie vo vertikálnom a horizontálnom smere



Obr. 9 Amplitúdové frekvenčné charakteristiky pre diferenciu prvého radu v horizontálnom, vertikálnom a diagonálnom smere
Sobelov detektor
Tento filter vyhľadáva hrany pomocou prvej derivácie obrazu a okrem diferenciácie vykonáva aj isté vyhladzovanie. Nakoľko samotná diferencia zvýrazňuje šum, je efekt vyhladzovania veľmi užitočný. Využíva sa hlavne na detekciu vodorovných a zvislých hrán. Tiež sa môže použiť na detekciu šikmých hrán, ak sa určitým spôsobom pootočí jeho impulzná charakteristika pre detekciu vodorovných alebo vertikálnych hrán. Pritom matica jeho impulznej charakteristiky pre detekciu horizontálnej resp. vertikálnej hrany má tvar. Detegované hrany pomocou Sobelovho detektora sú zobrazené na obr. 10



Obr. 10 Detekcia hrany pomocou Sobelového detektora vo vertikálnom a horizontálnom smere
Prewittovej detektor
Tento filter vyhľadáva hrany pomocou prvej derivácie obrazu. Je veľmi podobný Sobelovmu detektoru, ale nevykonáva žiadne vyhladzovanie. Impulzné odpovede pre horizontálne a vertikálne hrany sú nasledovné:

Laplaceov detektor
Laplaceov detektor využíva druhu deriváciu jasu obrazu, pričom vyhľadáva miesta, kde druha derivácia prechádza nulou. Výhodou je, že hľadanie prechodov nulou druhej derivácie jasovej funkcie je jednoduchšie, ako hľadanie maxím prvých derivácií. Prechod druhých derivácií nulou v Laplaciane vyhladzuje ostré tvary, čím stráca ostré rohy a je viac citlivý na šum, než predchádzajúce detektory. Túto citlivosť možno znížiť jeho kombináciou s Gaussovým filtrom do Laplaceovho - Gaussovho filtra. Ďalšie nevýhody Laplaceovho filtra sú, že produkuje dvojité hrany a neurčuje smer. Laplaceovú filtráciu je možné vykonať pomocou impulznej odpovede:

Na obr. 11 je zobrazená prenosová funkcia. Z prenosu si môžeme všimnúť, že tento filter má charakter HP. Na obr. 12 sú zobrazené detegované hrany. Laplaceov obraz je možné získať aj rozdielom pôvodného obrazu a obrazu filtrovaného pomocou Gaussovho filtra.

Obr. 11 Amplitúdová frekvenčná charakteristika Laplaceového detektora

Obr. 12 Detekcia hrany pomocou Laplaceového detektora